
I hold as fact (1) That small portions of space are in fact of a nature analogous to little hills on a surface which is on the average flat; namely, that the ordinary laws of geometry are not valid in them. (2) That this property of being curved or distorted is continually being passed on from one portion of space to another after the manner of a wave. (3) That this variation of the curvature of space is what really happens in that phenomenon that we call the motion of matter, whether ponderable or etherial. (4) That in the physical world nothing else takes place but this variation subject (possibly) to the law of continuity.
–William Kingdon Clifford
“On the Space Theory of Matter” (1870)

William Kingdon Clifford (1845-1879) was an English mathematician and sometime philosopher who contributed to our understanding of geometry and its connection to physics. I have a soft spot for His Beardliness (seriously, check that beard out!) because about 75% of my Ph.D. thesis used the branch of math he helped develop, which is known either as Clifford algebra or (the term he preferred) geometry algebra. He worked in non-Euclidean geometry and the philosophy of science. As the quote above shows, he was thinking about the same ideas as general relativity that Einstein pondered years later, though he never went farther than that. Clifford died very young: he was only 33 when he died, and his workaholic habits no doubt contributed to his failed health.
I have been spending a bit of time with Clifford’s scientific papers, and appreciating how clearly he wrote. He was thinking not just about the math in pure terms, but what it might mean pictorially and when applied to science. Part of it certainly was his era: much scientific literature was written with a broader audience than the narrow specializations we see today. Think about how Darwin wrote his Origin of Species for general readers, so it can still be read and appreciated today, where it might not be if he had aimed just at zoologists or geologists or whatnot. I doubt many non-scientists would read Clifford’s papers and get much out of them, but I have trouble reading the technical mathematical literature today because my training is in physics, so I certainly appreciate the insight and clarity the old boy provides.
Clifford studied quaternions (along with the work of German mathematician Hermann Günter Grassmann) and sought to extend their powerful techniques to more general applications, and in the process he developed his geometric algebra. I’m going to attempt to straddle the fine line and explain geometric algebra using a couple of simple examples, then point to the kinds of things modern scientists like me use it for.
The Gas Pedal and Steering Wheel, Clifford-Style

Imagine a car, driving down a winding road. Let’s not worry about elevation and assume the country is flat (compared of course to the curvature of Earth), so if you look down from above, you’d see the car trace a path in two dimensions. If we read the speed of the car off its speedometer and its direction by the way its headlights are pointing, we’d have a complete picture of the car’s position and motion at each point along the road. Following the normal convention, let’s draw axes along the north-south direction and the east-west direction; then we can draw a little arrow pointing in the direction of motion whose length is determined by the speed of the car.

That little arrow is a vector, and it determines the velocity (speed and direction together) of the car at each point. In general, the car may be moving somewhat north (or south) and east (or west), so we’ll draw a little triangle with the velocity as its hypotenuse. The legs of the triangle, which are perpendicular to each other, tell how north-traveling and east-traveling the car is; those are the components of the vector.
Let’s label the north direction with k and the east direction with j, so that we can write the velocity as the sum of how fast it’s going in the north direction and how fast it’s moving in the east direction, as shown. For those of you who read my earlier post on quaternions, this notation should look a little familiar—we’ve written the velocity using the quaternion imaginary units. As with the usual imaginary number i, the square of j and k is -1:![]() We’re used to the idea that for letters and words, the order matters a lot. If you don’t believe me, reading try sentence sith dna sense mkae. Yet when we multiply numbers together, we expect the order doesn’t matter, because that’s our ordinary experience. Nevertheless, quaternions are more like language, in which the order matters a lot:
We’re used to the idea that for letters and words, the order matters a lot. If you don’t believe me, reading try sentence sith dna sense mkae. Yet when we multiply numbers together, we expect the order doesn’t matter, because that’s our ordinary experience. Nevertheless, quaternions are more like language, in which the order matters a lot:

(I’m going to follow standard mathematical practice and leave out the multiplication sign when I’m using symbols as opposed to numbers.) That very feature turned out to let us describe rotations in three dimensions, where taking rotations in different orders will give you different results, as shown in the very elegant photocomic rerun from the earlier post. We say that if the order of multiplication doesn’t matters, the numbers commute, so real numbers and complex numbers commute, while quaternions do not.

Since our road is on a flat two-dimensional surface, we have only used two of the three quaternions, so what about i? I saved it for a special purpose, and this is where Clifford moved beyond Hamilton’s original quaternion formulation: we can use i to describe rotation. Just as the gas pedal dictates the speed of your car, the steering wheel changes its direction, and that’s the purpose i will play here. Notice that if you multiply the velocity by i on the left and use the multiplication table from above, you turn the car by 90°; multiply the velocity twice by i, and the car is moving in the opposite direction. In fact, that’s just another version of Euler’s equation, which I discussed in another previous post; a rotation by an arbitrary angle θ is the same as multiplying the velocity by
![]()

Somehow we’re using i to represent something separate from j and k, and that something is called a bivector or rotor. Just like you multiply length by width to get the area of a rectangle, a bivector is the length vector j times the width vector k (or just as easily, the negative of those two vectors). That gives us a sense of rotation in the counterclockwise direction. If you reverse the direction of either j or k, you’ll get a negative bivector representing rotation in the clockwise direction. We can draw the little squares, but I think it’s easier to draw the “steering wheels”: circles that tell which way we’re rotation, since there’s only two possibilities on our road: clockwise or counterclockwise.
I find it interesting that Hamilton went searching for a two-dimensional version of complex numbers and found quaternions, thinking he had discovered a three-dimensional version instead. Clifford showed that Hamilton actually succeeded, but you to think about the third quaternion as a bivector rather than a direction in space. We can still think of quaternions in three dimensions, and that’s very useful, but if we really want to talk about rotations in three dimensions or the theory of relativity, we have to use Clifford’s ideas.
One Dimension, Two Dimensions, Three Dimensions, Four!

If we stick to stuff in two dimensions, our lives aren’t very complicated. There is only one plane in which to rotate, but in three dimensions, you have an infinite number of planes for rotation! Well, that’s overstating the problem: just like we can pick three perpendicular directions (east-west, north-south, and up-down), we can pick three perpendicular planes for rotations and write all the others as combinations of those three. In fact, thanks to our tutorial in two dimensions, we are already primed to think of planes of rotation using quaternions, so let’s label each plane with a quaternion unit, standing for bivectors. Rotation in a clockwise direction in the x-y plane is indicated by i, rotation in the y-z plane is indicated by j, and in the z-x plane is indicated by k.
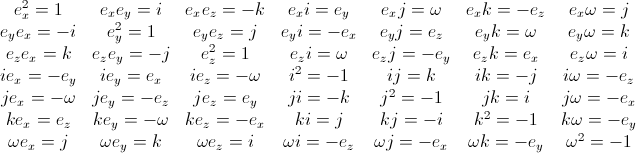
If we’re using quaternions for bivectors, we should introduce another mathematical beast for the x, y, and z directions. I won’t use Clifford’s notation, but I’m definitely following his practice by writing three new vectors ex, ey, and ez that have the following multiplication table:
 Just like with quaternions, the order of multiplication matters, and vectors in perpendicular directions don’t commute. As I mentioned in the previous post, we can represent rotations in three dimensions using quaternions and Euler’s equation, so we’ve gained some interesting insight without much new math needed! Combined with the rules for multiplying quaternions and one more object called a trivector
Just like with quaternions, the order of multiplication matters, and vectors in perpendicular directions don’t commute. As I mentioned in the previous post, we can represent rotations in three dimensions using quaternions and Euler’s equation, so we’ve gained some interesting insight without much new math needed! Combined with the rules for multiplying quaternions and one more object called a trivector
![]() and we have a complete set of rules for three dimensions. (I won’t write them all down for you, to spare those who are getting impatient with all the equations. Click here if you want to see them, but I encourage interested readers to work them out yourself before looking.) The trivector basically tells you how the x, y, and z axes are oriented, and I’ve never seen a satisfactory (to me) pictorial representation, so we won’t really try.
and we have a complete set of rules for three dimensions. (I won’t write them all down for you, to spare those who are getting impatient with all the equations. Click here if you want to see them, but I encourage interested readers to work them out yourself before looking.) The trivector basically tells you how the x, y, and z axes are oriented, and I’ve never seen a satisfactory (to me) pictorial representation, so we won’t really try.
(Aside: for those of you who have seen vector algebra, you might be wondering why we use i, j, and k for quaternions when you used them for unit vectors in the x, y, and z directions. The answer is that American physicist Josiah Willard Gibbs took quaternions and used the symbols for his own system, in common use today. I actually find Gibbs’ system frustrating because it only works in three dimensions and thus is useless for relativity. Even stuff like rotations are fairly awkward, so when you get into higher-level physics, you have to learn a whole new set of operations. I don’t like that: it’s inefficient. I think Gibbs came up with his system to punish the world for being named “Josiah Willard”.)
In two dimensions, quaternions sufficed: we have three imaginary units along with the real numbers, making a set of four things to describe motion and rotation. In three dimensions, we have three vectors, three quaternions, and a trivector, along with the real numbers, making eight objects to combine for motion and rotation. Four dimensions will have four vectors, six bivectors, four trivectors, and one 4-vector (or tetravector, I suppose), making 16 objects for motion and rotation. Each extra dimension adds several more objects, but the rules can be built up in a simple way, so the Clifford scheme for geometric algebra allows us to handle it all in a straightforward manner.
I can go farther, introduce the way to do relativity, talk about fun stuff like symmetry operations and the like, but I think I’ll wind down now. What’s important is that we can develop a language of geometry, with its own grammar and vocabulary, and use that language for our scientific endeavors. Today, geometric algebra is used for the intricate calculations required in quantum field theory; engineers use it for robotics and designing aircraft. Some computer programmers use it for creating realistic motion in games and other simulations. As with any language, there’s an initial barrier you must get over to speak it fluently, but once you’ve done so, it’s worth your while. New languages can lead to new ways of thinking, and the language Clifford taught us is no different.

{kind=link}
8 responses to “W. K. Clifford: The Geometry of Physics”
Simply put, its the the fibonacci sequence at its best!
Actually, it’s simpler than that: if you’re in x dimensions, the total number of objects in the Clifford algebra is 2x. (That includes the real numbers, by the way.)
[…] I even find myself demurring sometimes about math to suit the cultural prejudices, and I’m as math-focused as can be in my physics […]
[…] foundational to 20th century physics: non-Euclidean geometry, complex numbers, quaternions, and Clifford algebras. I doubt I’ll ever cover all of it, and of course I can only provide a very minimal […]
[…] W. K. Clifford: The Geometry of Physics « Galileo’s Pendulum […]
[…] phenomenally harder. The order of multiplication doesn’t matter, as it does with quaternions, Clifford numbers, or Grassmann numbers. In fact, for some applications like electrical engineering or the processing […]
[…] later mathematical work of Hermann Grassmann, William Kingdon Clifford, and many others arose thanks to Hamilton’s efforts. It’s not terribly far-fetched to […]
[…] For hints on how to define rotations in a more rigorous way, see my earlier posts on quaternions, Clifford algebras, and complex numbers. I was attempting to use an analogy to clarify how we can understand the phase […]